题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
考查任何一棵高度为h的二叉树T,设其中深度为k的叶节点有nk个,0≤k≤h。a)试证明:b)以上不等式
考查任何一棵高度为h的二叉树T,设其中深度为k的叶节点有nk个,0≤k≤h。
a)试证明:
b)以上不等式取等号的充要条件是什么?
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
考查任何一棵高度为h的二叉树T,设其中深度为k的叶节点有nk个,0≤k≤h。
a)试证明:
b)以上不等式取等号的充要条件是什么?
答案
 更多“考查任何一棵高度为h的二叉树T,设其中深度为k的叶节点有nk个,0≤k≤h。a)试证明:b)以上不等式”相关的问题
更多“考查任何一棵高度为h的二叉树T,设其中深度为k的叶节点有nk个,0≤k≤h。a)试证明:b)以上不等式”相关的问题
第1题
第2题
一维无限深方势阱中的粒子,设初始时刻(t=0)处于

分别为基态和第一激发态,求

(b) 能量平均值H
(c) 能量平方平均值
(d) 能量的涨落
(e) 体系的特征时间 计算
计算
第3题
设粒子处于无限深方势阱 中,粒子波函数为
中,粒子波函数为 ,A为归一化常数,设粒子处于基态(n=1),
,A为归一化常数,设粒子处于基态(n=1), 设t=0时刻阱宽突然变为2a,粒子波函数来不及改变,即
设t=0时刻阱宽突然变为2a,粒子波函数来不及改变,即

试问:对于加宽了的无限深方势阱

 是否还是能量本征态?求测得粒子处于能量本征值
是否还是能量本征态?求测得粒子处于能量本征值 的概率。
的概率。
第5题
第8题
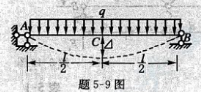
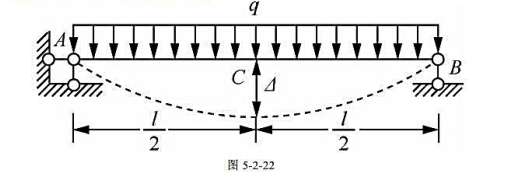
试求图5-2-22所示简支梁中点C的竖向位移 ,并将剪力和弯矩对位移的影响加以比较.设截面为矩形,h为截面高度,G=3E/8,k=1.2,h/l=1/10.
,并将剪力和弯矩对位移的影响加以比较.设截面为矩形,h为截面高度,G=3E/8,k=1.2,h/l=1/10.
第9题
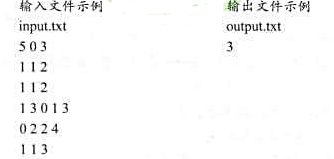
算法设计:对于给定的树T,以及障碍物在树T中的分布情况,计算机器人从起点s到终点t的最少移动次数.
数据输入:由文件input.txt提供输入数据.文件的第1行有3个正整数n,s和t,分别表示树T的顶点数,起点s的编号和终点t的编号.
接下来的n行分别对应于树T中编号为0,1,...,n-1的项点.每行的第1个整数h表示顶点的初始状态,当h+1时表示该顶点为空顶点,当h=0时表示该顶点为满顶点,其中已有一个障碍物.第2个数k表示有k个顶点与该项点相连.接下来的k个数是与该顶点相连的顶点编号.
结果输出:将计算出的机器人最少移动次数输出到文件output.txt.如果无法将机器人从起点s移动到终点t,则输出“NoSolution!"
第10题
1)设A为一个n级实矩阵,且|A|≠0,证明A可以分解成A=QT,其中Q是正交矩阵,T是上三角形矩阵:
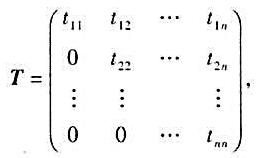
ii>0(i=1,2,...,n),并证明这个分解是唯一的;
2)设A是n级正定矩阵,证明存在一上三角形矩阵T,使A=T'T。
第11题
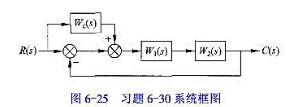
设复合控制系统的方框图如图6-25所示,其中前馈补偿装置的传递函数为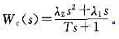 。式中,T为已知常数,
。式中,T为已知常数, 。试确定使系统等效为II型系统时的λ1和λ2的数值。
。试确定使系统等效为II型系统时的λ1和λ2的数值。