题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
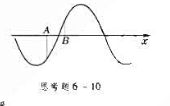
在一维简谐波的传播路径上,A点的相位超前于B点(见本题图),波动朝哪个方向传播?若A点的相位落后
在一维简谐波的传播路径上,A点的相位超前于B点(见本题图),波动朝哪个方向传播?若A点的相位落后呢?
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
在一维简谐波的传播路径上,A点的相位超前于B点(见本题图),波动朝哪个方向传播?若A点的相位落后呢?
答案
 更多“在一维简谐波的传播路径上,A点的相位超前于B点(见本题图),波动朝哪个方向传播?若A点的相位落后”相关的问题
更多“在一维简谐波的传播路径上,A点的相位超前于B点(见本题图),波动朝哪个方向传播?若A点的相位落后”相关的问题
第1题
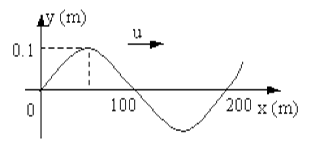
一平面简谐波在空间传播,如图所示,已知A点的振动规律为
试写出:

(1)该平面简谐波的表达式;
(2)B点的振动表达式(B点位于A点右方d处)。
第2题
沿一平面简谐波的波线上,有相距2.0m的两质点A与B,B点振动相位比A点落后 ,已知振动周期为2.0s,求波长和波速。
,已知振动周期为2.0s,求波长和波速。
第4题
A.a= -0.4 p 2cos(2pt+p/2)(SI)
B.a= -0.4 p 2cos(2pt-p)(SI)
C.a= 0.4 p 2cos(pt-3p/2)(SI)
D.a= 0.4p2cos(pt-p/2)(SI)
第7题
算法设计:对于给定的树T,以及障碍物在树T中的分布情况,计算机器人从起点s到终点t的最少移动次数.
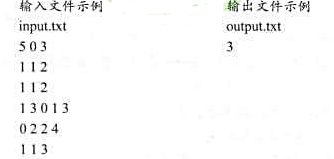
数据输入:由文件input.txt提供输入数据.文件的第1行有3个正整数n,s和t,分别表示树T的顶点数,起点s的编号和终点t的编号.
接下来的n行分别对应于树T中编号为0,1,...,n-1的项点.每行的第1个整数h表示顶点的初始状态,当h+1时表示该顶点为空顶点,当h=0时表示该顶点为满顶点,其中已有一个障碍物.第2个数k表示有k个顶点与该项点相连.接下来的k个数是与该顶点相连的顶点编号.
结果输出:将计算出的机器人最少移动次数输出到文件output.txt.如果无法将机器人从起点s移动到终点t,则输出“NoSolution!"
第8题
第9题
已知系统的开环传遇函数为

试采用频率法设计超前校正装置Ge(s)使得系统实现如下的性能指标
(a)静志速度误差系数Ky≥100:.
(b)开环械止频率心we>30:
(c)相位裕度ye>20°。
第10题
在一维势箱中运动的粒子,它的一个定态波函数如图a所示,对应的总能量为4eV,若它处于另一个波函数(如图b所示)的态上时,它的总能量是多少?粒子的零点能是多少?