题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[判断题]
对差分方程而言,状态转移是指对状态向量求一阶导数。()
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
答案
拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
答案
 更多“对差分方程而言,状态转移是指对状态向量求一阶导数。()”相关的问题
更多“对差分方程而言,状态转移是指对状态向量求一阶导数。()”相关的问题
第1题
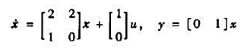
某被控对象的动态方程

①设计状态反馈向量k ,使得经状态反馈u=kx+r后,闭环系统极点在-1±j处,这里r为参考输入。
②对该被控对象构造一极点为-5、-5的状态观测器。
③若采用控制u=kx+r,其中k为本题①求出的反馈向量、x为本题②所设计的状态观测器,求由被控对象、状态观测器反馈u=kx+r构成的闭环系统的传递函数。
第2题
 式中:T≥0为时滞常数。在Matlab中提供了命令dde23来直接求解时滞微分方程。其调用格式为801=dde23(ddefun,lags,history,tspan,options),
式中:T≥0为时滞常数。在Matlab中提供了命令dde23来直接求解时滞微分方程。其调用格式为801=dde23(ddefun,lags,history,tspan,options),
其中,ddfun为描述时滞微分方程的函数;lags为时滞常数向量;history为描述t≤to时的状态变量值的函数;tspan为求解的时间区间;options为求解器的参数设置。该函数的返回值sol是结构体数据,其中sol.x成员变量为时间向量l,sol.y成员变量为各个时刻的状态向量构成的矩阵,其每一个行对应着一个状态变量的取值。求解如下时滞微分方程组:
 已知,在i≤0时,x(t)=5,x2(t)=0,x(1)=1,试求该方程组在[0,40]上的数值解。
已知,在i≤0时,x(t)=5,x2(t)=0,x(1)=1,试求该方程组在[0,40]上的数值解。
第3题
某被控制对象的动态方程
①设计状态反馈向量k,使得经状态反馈u=kx+r后,闭环系统在输入r=1(t)、x(0)=0时,响应的超调量为16.3%、过渡过程为7s(取5%误差带)。
②设x(0)=0,求经上述状态反馈后闭环系统在输入信号r=1(t)作用下的响应y(t)。
第5题
已知y1(n)=2n,y2(n)=2n-4n+1是差分方程 两个特解,求满足条件的P(n),f(n)以及方程的通解。
两个特解,求满足条件的P(n),f(n)以及方程的通解。
第11题
求下列线性差分方程的通解或特解:
(1)yn+2+3yn+1=0;
(2)yn+1-2yn=2n2-1;
(3)yn+1-yn=n+3;
(4)yn+1-3yn=3n;
(5)yn+1-2yn=-cos2n;
(6)yn+1+2yn=2n-1+en;
(7)yn+1+2yn=3·2n,y0=0。

 的通解.
的通解.
 ,a,β为常数,a≠0。
,a,β为常数,a≠0。