题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
水箱液面高度控制系统的三种原理方案如图2-1-1所示。在运行中,希望液面高度H维持不变。①试说明各
水箱液面高度控制系统的三种原理方案如图2-1-1所示。在运行中,希望液面高度H维持不变。
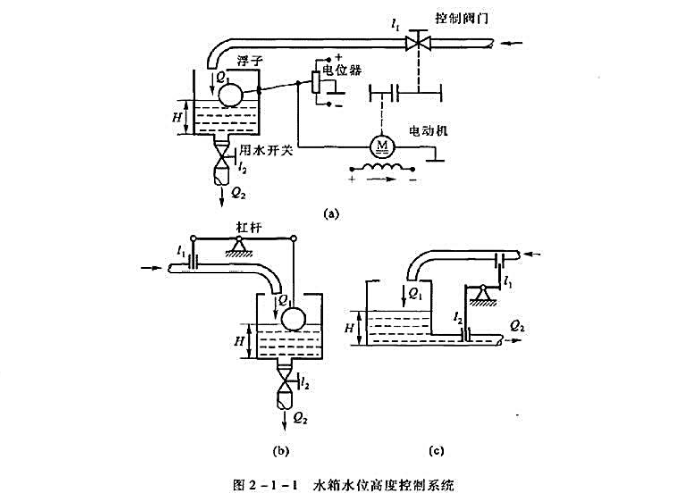
①试说明各系统的工作原理。
②画出各系统的方框图,并指出被控对象、被控量、给定值、干扰量是什么?
③试说明各系统属于哪种控制方式。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
水箱液面高度控制系统的三种原理方案如图2-1-1所示。在运行中,希望液面高度H维持不变。
①试说明各系统的工作原理。
②画出各系统的方框图,并指出被控对象、被控量、给定值、干扰量是什么?
③试说明各系统属于哪种控制方式。
答案
 更多“水箱液面高度控制系统的三种原理方案如图2-1-1所示。在运行中,希望液面高度H维持不变。①试说明各”相关的问题
更多“水箱液面高度控制系统的三种原理方案如图2-1-1所示。在运行中,希望液面高度H维持不变。①试说明各”相关的问题
第1题
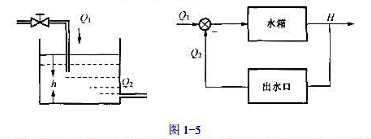
(1)出水流量对水箱水位构成何种作用?
(2)系统是否可以称为闭环控制系统?
第2题
第3题
控制系统如图4-29所示,其中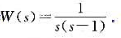
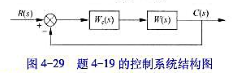
(1)当Wc=kg时,由所绘制的根轨迹证明系统总是不稳定的。
(2)当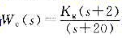 时,绘制系统的根轨迹,并确定使系统稳定的Kg值范围。
时,绘制系统的根轨迹,并确定使系统稳定的Kg值范围。
第4题
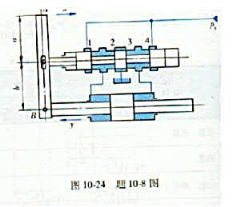
图10-24所示为四通伺服阀控制的机液伺服控制系统,试阐述工作原理,画出系统的框图,并求出其x输入输出y之比。
第5题
设有如图6-20所示控制系统
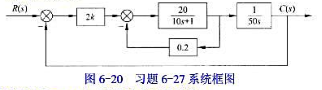
(1)根据系统的谐振峰值Mp=1.3确定前置放大器的增益k;
(2)根据对Mp=1.3及速度稳态误差系数Kv≥4s-1要求,确定串联滞后校正环节的参数。
第6题
设复合控制系统的方框图如图6-25所示,其中前馈补偿装置的传递函数为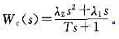 。式中,T为已知常数,
。式中,T为已知常数, 。试确定使系统等效为II型系统时的λ1和λ2的数值。
。试确定使系统等效为II型系统时的λ1和λ2的数值。
第7题
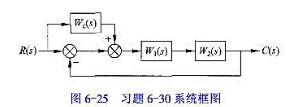
数字控制系统结构图如图8-14所示,采样周期T=1s。
(1)试求未校正系统的闭环极点,并判断其稳定性。
(2)xt(t)=t时,按最少拍设计,求D(z)表达式,并求X0(z)的级数展开式。
第8题
已知某控制系统的方框图如图6-21所示,欲使系统在反馈校正后满足如下要求:
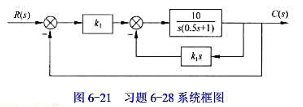
(1)速度稳态误差系数Kv≥5s-1;
(2)闭环系统阻尼比ξ=0.5;
(3)调节时间te(5%)≤2s。
试确定前置放大器增益k1及测速反馈系数kt(kt要求在0~1间选取)。
第9题
如图x1.4所示,考查缺失右上角(面积为4n-1)的2n×2n棋盘,n≥1。
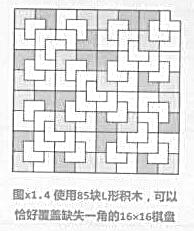
a)试证明,使用由三个1x1正方形构成、面积为3的L形积木,可以恰好覆盖此类棋盘;
b)试给出一个算法,对于任意n≥1,给出覆盖方案;
c)该算法的时间复杂度是多少?
第10题
A.防爆电机
B.超导电机
C.屏蔽电机
D.异步电机
第11题