题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
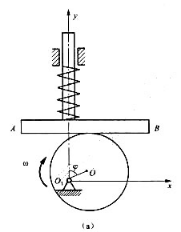
题8-13图(a)所示半径为R的偏心轮以匀角速度w绕O轴转动,推动导板ABD沿铅垂轨道作平移。已知偏心
题8-13图(a)所示半径为R的偏心轮以匀角速度w绕O轴转动,推动导板ABD沿铅垂轨道作平移。已知偏心距OC=e,开始时OC沿水平线。若在导板顶部D处放有一质量为m的物块。试求:
(1)导板对物体的最大约束反力及此时偏心C的位置。
(2)欲使物块不离开导板角速度w的最大值。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
题8-13图(a)所示半径为R的偏心轮以匀角速度w绕O轴转动,推动导板ABD沿铅垂轨道作平移。已知偏心距OC=e,开始时OC沿水平线。若在导板顶部D处放有一质量为m的物块。试求:
(1)导板对物体的最大约束反力及此时偏心C的位置。
(2)欲使物块不离开导板角速度w的最大值。
答案
 更多“题8-13图(a)所示半径为R的偏心轮以匀角速度w绕O轴转动,推动导板ABD沿铅垂轨道作平移。已知偏心”相关的问题
更多“题8-13图(a)所示半径为R的偏心轮以匀角速度w绕O轴转动,推动导板ABD沿铅垂轨道作平移。已知偏心”相关的问题
第1题
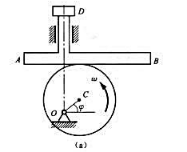
题11-16图(a)所示一凸轮导板机构,偏心圆轮的圆心为O,半径为r,偏心距OO1=e,绕O轴以匀角速度w转动。当导板AB在最低位置时,弹簧的压缩量为b,导板质量为m。要使导板在运动过程中始终不离偏心轮,试求弹簧刚度系数。
第2题
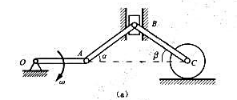
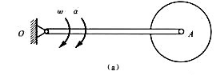
题7-16图(a)所示平面机构,杆OA长为l,以角速度w绕O轴转动从而带动半径为r的轮C沿水平直线作纯滚动。在图示位置,O,A和C三点在同一水平线上,a和β角已知。试求该瞬时轮C的角速度。
第3题
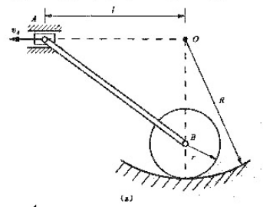
题7-28图(a)所示机构中,已知滑块A以匀速度vA=12cm/s沿水平直槽向左运动,并通过连杆AB带动轮B沿圆弧轨道作无滑动的滚动。轮B的半径为r=2cm,圆弧轨道的半径为R=5cm,在图示位置滑块A离圆弧轨道中心的距离为l=4cm。试求该瞬时连杆AB的角加速度及轮B的角加速度。
第4题
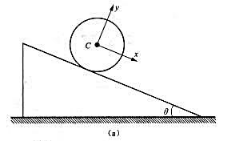
题10-18图(a)所示,一均质圆柱,质量为m,半径为r,无初速地放在倾角为θ的斜面上,轮与斜面的摩擦因数为f,若不计滚动阻力,试求其质心的加速度。
第5题
求题9-3图所示均质物体或物体系统的动量。
(a)均质轮质量为m,半径为R,绕质心轴C转动,角速度为w,如题9-3图(a)所示。
(b)非均质轮质量为m,半径为R,偏心距为e,绕轴O转动,角速度为w,如题9-3图(b)所示。
(c)均质轮质量为m,半径为R,沿水平直线轨道纯滚动,轮心的速度为U,如题9-3图(c)所示。
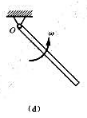
(d)均质杆质量为m,杆长为L,绕杆端轴O转动,角速度为w,如题9-3图(d)所示。
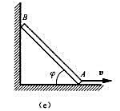
(e)均质杆质量为m,杆长为L,题图9-3(e)所示瞬时A端速度为v。
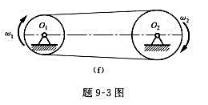
(F)皮带轮传动系统由均质轮和均质皮带组成,轮O1的质量为m1,半径为r1,轮O2的质量为m2,半径为r2,皮带的质量为m2,如题9-3图(F)所示。



第6题
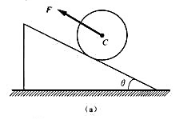
题11-7图(a)所示,已知质量为半径为r的均质圆盘在力F作用下,沿倾角为θ=30"的斜面向上作纯滚动,F=mg,试求质心C的加速度a和斜面对圆盘的约束力。
第7题
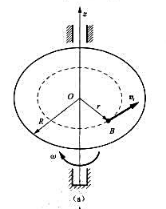
题10-14图(a)所示,半径为R,质量为m1的均质圆盘,可绕轴z转动一质量为m2的人在盘上由点B按规律s=at2/2沿半径为r的圆周行走,开始时,圆盘和人静止,不计轴承摩擦,试求圆盘的角速度和角加速度。
第8题
题11-5图(a)所示系统由均质圆盘与均质细杆铰接而成。已知圆盘半径为r,质量为M,质量为m。在图示水平位置杆的角速度为w,角加速度为a,圆盘的角速度,角加速度均为零,试求系统惯性力系向定轴O简化的主矢与主矩。
第9题
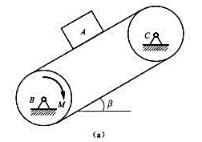
题12-13图(a)所示一皮带运输机构,设皮带质量可忽略,皮带与水平面的倾角为β,被提升的重物A质量为m1,轮B和轮C的半径均为r,质量均为m2。如机构在启动时主动轮B受转动力偶M作用,试求重物A随皮带倾斜上升的加速度。轮B和轮C均可视为均质圆盘。
第10题
第11题
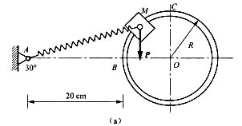
题12-5图(a)所示系统,与弹簧相连的滑块M可沿固定的光滑圆环滑动,圆环和弹货都在同一铅直平面内,已知滑块M的重量为P=100N,圆环的半径为R=10cm,弹簧原长为l0=15cm,弹簧的刚度系数为k=400 N/m,试求滑块从位置C运动到位置B的过程中,滑块上各力所做的总功。