题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
试计算一带式输送机中的普通V带传动(确定带的型号、长度及根数)。已知从动轮的转速n2=610r/min,单班工作制,电动机额定功率为7.5kW,主动轮转速n1=1450r/min。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
答案
 更多“试计算一带式输送机中的普通V带传动(确定带的型号、长度及根数)。已知从动轮的转速n2=610r/min,单班工作制,电动机额定功率为7.5kW,主动轮转速n1=1450r/min。”相关的问题
更多“试计算一带式输送机中的普通V带传动(确定带的型号、长度及根数)。已知从动轮的转速n2=610r/min,单班工作制,电动机额定功率为7.5kW,主动轮转速n1=1450r/min。”相关的问题
第1题
(1)确定齿轮传动类型并计算啮合角a'.
(2)按无侧隙啮合设计齿轮1变位系数x1、节圆半径r1´及齿顶圆半径ra´.
(3)用齿条刀具加工齿轮1,试确定刀具参数并计算刀具中线与齿轮毛坯中心距离L.
(4)此设计方案是否完善,若需改进请说明.
第2题
第4题
为了得到重合度 y=6,试确定齿数z1=24,z2=36,mn=10mm,及b=240mm的斜齿轮传动的螺旋角.
y=6,试确定齿数z1=24,z2=36,mn=10mm,及b=240mm的斜齿轮传动的螺旋角.
第5题
设 其中+和·分別代表普通加法和乘法,对下面给定的每个集合确定它是否构成V的子代数,为什么?
其中+和·分別代表普通加法和乘法,对下面给定的每个集合确定它是否构成V的子代数,为什么?
第6题
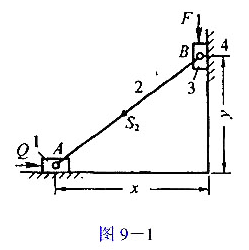
在图9-1所示机构中,已知:x=250mm,y=200mm,lAS2=128mm,F为驱动力,Q为有效阻力.m1=m3=2.75kg,m2=4.59kg,Js2=0.0l2kg·m2,又原动件3以等速v=5m/s向下移动,试确定作用在各构件上的惯性力.
第7题
第8题

第9题
ClO2-(弯曲形),ClO3-(三角锥形)和ClO4-(四面体形)离子中,Cl—O键的平均键长值分别为157pm,148pm和142.5pm,试分别计算其键价及键价和。[利用(10.1)式计算Cl原子和O原子成键时,R0值为:Cl2+171pm,Cl5+167pm,C17+163.2pm,B值为37pm。]
第10题
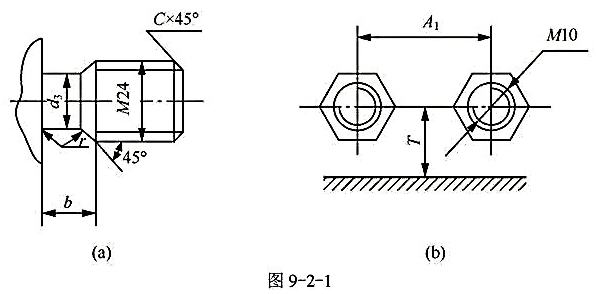
试确定下列结构尺寸:
(1)普通螺纹退刀槽的宽度b,沟槽直径d,过渡圆角半径r及尾部倒角C(图9-2-1(a));
(2)扳手空间所需的最小中心矩Ar和螺栓轴线与箱壁的最小距离T(图9-2-1(b))。
第11题
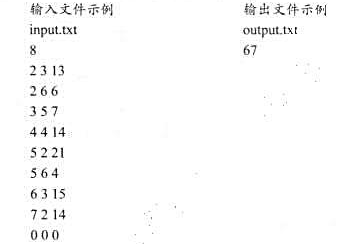
问题描述:机器人Rob在一个有n×n个方格的方形区域F中收集样本.(i,j)方格中样本的价值为v(i,j),如图3-6所示.Rob从方形区域F的左上角A点出发,向下或向右行走,
直到右下角的B点,在走过的路上,收集方格中的样本.Rob从A点到B点共走2次,试找出Rob的2条行走路径,使其取得的样本总价值最大.
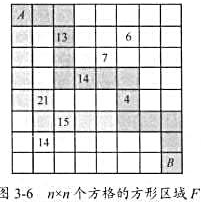
算法设计:给定方形区域F中的样本分布,计算Rob的2条行走路径,使其取得的样本总价值最大.
数据输入:由文件input.xt给出输入数据.第1行有1个正整数n,表示方形区域F有n×n个方格.按下来每行有3个整数,前2个数表示方格位置,第3个数为该位置样本价值.最后一行是3个0.
结果输出:将计算的最大样本总价值输出到文件output.txt.