题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
将一个物体垂直上抛,经过t秒后,物体上升的高度为 ,求t=1时物体的瞬时移动速度.
将一个物体垂直上抛,经过t秒后,物体上升的高度为 ,求t=1时物体的瞬时移动速度.
,求t=1时物体的瞬时移动速度.
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
将一个物体垂直上抛,经过t秒后,物体上升的高度为,求t=1时物体的瞬时移动速度.
答案
 更多“将一个物体垂直上抛,经过t秒后,物体上升的高度为 ,求t=1时物体的瞬时移动速度.”相关的问题
更多“将一个物体垂直上抛,经过t秒后,物体上升的高度为 ,求t=1时物体的瞬时移动速度.”相关的问题
第1题
某物体的运动轨迹可以用其位移和时间关系式s=s(t)来刻画,其中s以米计,t以秒计,下而是其两个不同的运动轨迹

试分别计算:
(1)物体在给定的时间区间内的平均速事;
(2)求物体在区间端点的速度;
(3)物体在给定的时间区间内运动方向是否发生了变化?若是,在何时发生改变?
第2题
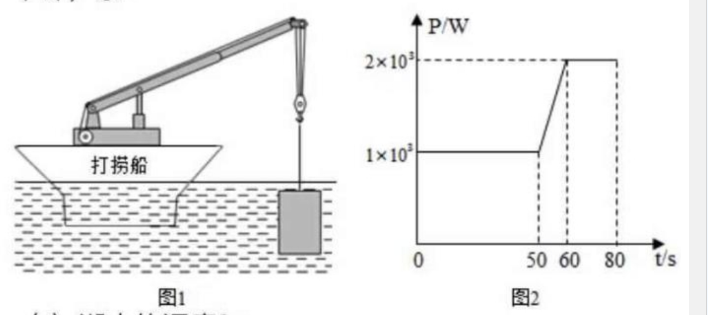
(1)湖水的深度h;
(2)物体的密度p;
(3)在0~50s时间内,若电动机的效率为80%,求电动机线圈电阻。
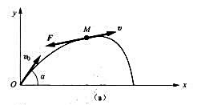
第4题
题8-16图(a)所示,在重力作用下以仰角a,初速度v0抛射出一质量为m物体M。假设空气阻力与速度成正比,方向与速度方向相反,即F=-Cv,C为阻力系数。试求抛射体的运动方程。
第7题
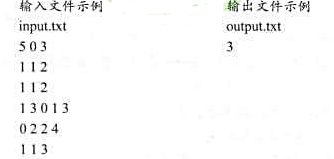
算法设计:对于给定的树T,以及障碍物在树T中的分布情况,计算机器人从起点s到终点t的最少移动次数.
数据输入:由文件input.txt提供输入数据.文件的第1行有3个正整数n,s和t,分别表示树T的顶点数,起点s的编号和终点t的编号.
接下来的n行分别对应于树T中编号为0,1,...,n-1的项点.每行的第1个整数h表示顶点的初始状态,当h+1时表示该顶点为空顶点,当h=0时表示该顶点为满顶点,其中已有一个障碍物.第2个数k表示有k个顶点与该项点相连.接下来的k个数是与该顶点相连的顶点编号.
结果输出:将计算出的机器人最少移动次数输出到文件output.txt.如果无法将机器人从起点s移动到终点t,则输出“NoSolution!"
第8题
A.χ2检验
B.配对t检验
C.成组t检验
D.配对设计差值的符号秩和检验
E.成组设计两样本比较的秩和检验
第9题
A.需氧系列
B.ATP-CP系列
C.ATP及辅酶A系列
D.乳酸系列
E.以上均不是
第10题
A.需氧系列
B.ATP-CP系列
C.ATP及辅酶A系列
D.乳酸系列
E.以上均不是
第11题