题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
设定为直角坐标系时,机器人控制点沿X、Y、Z轴()移动。
设定为直角坐标系时,机器人控制点沿X、Y、Z轴()移动。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
答案
 更多“设定为直角坐标系时,机器人控制点沿X、Y、Z轴()移动。”相关的问题
更多“设定为直角坐标系时,机器人控制点沿X、Y、Z轴()移动。”相关的问题
第1题
A.轴1-3
B.轴4-6
C.线性
D.重定位
第2题
设新旧坐标系都是右手直角坐标系,点的坐标变换公式为
(1)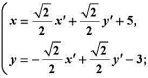
(2)
其中,(x,y)与(x',y')分别表示同一点的旧坐标与新坐标,求新坐标系的原点的旧坐标,并且求坐标轴旋转的角θ.
第6题
在给定了空间直角坐标系的三维空间中,所有自原点引出的向量添上零向量构成一个三维线性空间R3。
1)问所有终点都在一个平面上的向量是否为子空间?
2)设有过原点的三条直线,这三条直线上的全部向量分别成为三个子空间L1,L2,L3。问L1+L2,L1+L2+L3能构成哪些类型的子空间,试全部列举出来。
3)试用几何空间的例子来说明:若U,V,X,Y是子空间,满足U+V=X,X Y,是否一定有Y=Y∩U+Y∩V。
Y,是否一定有Y=Y∩U+Y∩V。
第8题
A.局地直角坐标系中不考虑球面曲率的作用
B.局地直角坐标系中,地球自转角速度不再是常量
C.局地直角坐标系x轴指向东,y轴指向北,z轴与地球旋转轴的方向相同
D.局地直角坐标系是一种惯性坐标系
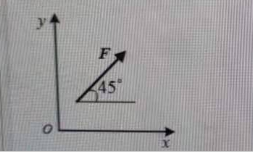
第9题
在图示直角坐标系中,F=200kN,力F与x轴的夹角为45°,则该力在要y轴上的投影大小为()。