题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
设有线性规划问题及这里λ,μ均为大于0的实数,说明这两个问题的最优解的关系。当λ<0或μ<0时,这两
设有线性规划问题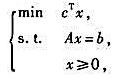 及
及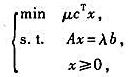 这里λ,μ均为大于0的实数,说明这两个问题的最优解的关系。当λ<0或μ<0时,这两者关系如何?
这里λ,μ均为大于0的实数,说明这两个问题的最优解的关系。当λ<0或μ<0时,这两者关系如何?
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
设有线性规划问题及这里λ,μ均为大于0的实数,说明这两个问题的最优解的关系。当λ<0或μ<0时,这两者关系如何?
答案
 更多“设有线性规划问题及这里λ,μ均为大于0的实数,说明这两个问题的最优解的关系。当λ<0或μ<0时,这两”相关的问题
更多“设有线性规划问题及这里λ,μ均为大于0的实数,说明这两个问题的最优解的关系。当λ<0或μ<0时,这两”相关的问题
第1题
考虑三阶系统
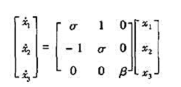
这里σ、β均为实数。试确定系统平衡状态x=0渐近稳定、李氏(Lyapunov)稳定及不稳定时,σ、β应满足的条件。
第2题
第4题
(1)写出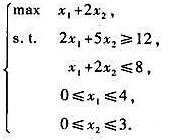 可行区域D中的所有顶点;
可行区域D中的所有顶点;
(2)证明若一个线性规划问题在两个顶点上达到最优值,则此线性规划问题必有无穷多个最优解。
第5题
第6题
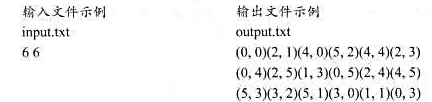
算法设计:对于给定的偶数m,n≥6,且|m-n|≤2,计算m×n的国际象棋棋盘上马的一条Hamilton周游路线.
数据输入:由文件input.txt给出输入数据.第1行有两个正整数m和n,表示给定的国际象棋棋盘山m行,每行n个格子组成.
结果输出:将计算出的马的,Hamilton周游路线用下面的两种表达方式输出到文件output.txt.
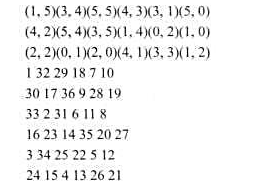
第1种表达方式按照马步的次序给出马的Hamilton周游路线.马的每一步用所在的方格坐标(x,y)来表示.x表示行坐标,编号为0,1,...,m-1;y表示列坐标,编号为0,1...,n-1.起始方格为(0,0).
第2种表达方式在棋盘的方格中标明马到达该方格的步数.(0,0)方格为起跳步,并标明为第1步.
第7题
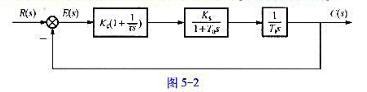
控制系统结构如图5-2所示,其中 为大于0的已知参数,且τ>T0.试画出系统的大致开环幅相特性曲线,并推导使系统具有最大相焦裕虽的ω值及kt值。
为大于0的已知参数,且τ>T0.试画出系统的大致开环幅相特性曲线,并推导使系统具有最大相焦裕虽的ω值及kt值。
第10题
应用希瓦尔兹引理,证明:把|z|<1变为|ω|<1, 且把a变为0的双方单值保形映照一定有下列形状
这里0是实常数,a是满足|a|<1的复常数。
第11题
设A={a}n={an|n≥0},B是单元素集合B=(z),这里z是a的无限串即B={aaa···},设R是AUB上的关系,定义如下:

证明或否定< A,z>∈R+。

 是有限布尔代数
是有限布尔代数 中的所有原子,那么y=0当且仅当对每一个i都有
中的所有原子,那么y=0当且仅当对每一个i都有 这里,1≤i≤r.
这里,1≤i≤r.