题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知传递函数G(s)H(s)的幅相特性曲线如图2-5-19所示,图中P是G(s)H(s)分母中实部为正的根的数
已知传递函数G(s)H(s)的幅相特性曲线如图2-5-19所示,图中P是G(s)H(s)分母中实部为正的根的数目。试说明传递函数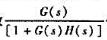 代表的闭环系统是否稳定,为什么?
代表的闭环系统是否稳定,为什么?
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
已知传递函数G(s)H(s)的幅相特性曲线如图2-5-19所示,图中P是G(s)H(s)分母中实部为正的根的数目。试说明传递函数代表的闭环系统是否稳定,为什么?
答案
 更多“已知传递函数G(s)H(s)的幅相特性曲线如图2-5-19所示,图中P是G(s)H(s)分母中实部为正的根的数”相关的问题
更多“已知传递函数G(s)H(s)的幅相特性曲线如图2-5-19所示,图中P是G(s)H(s)分母中实部为正的根的数”相关的问题
第1题
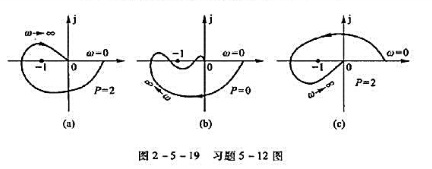
某一位置随动系统,其开环传递函数为G(s)H(s)=K/s(5s+1),为了改善系统性能,分别采用在原系统中加比例及微分串联校正和速度反馈两种不同方案,校正前后的具体结构参数如图2-4-23所示。
①试分别绘制这三个系统K从0→∞的闭环根轨迹图。
②比较两种校正对系统阶跃响应的影响。
第3题
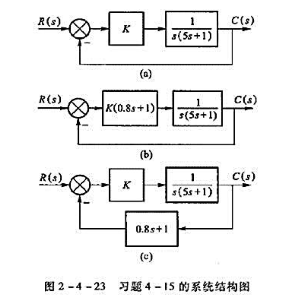
已知系统结构图如图2-2-18所示。
①求传递函数C(s)/R(s) ,C(s)/N(s)。
②若要消除N(s)的影响,C4(s) =?
第4题
第5题
设负反馈控制系统中
要求:
①概略绘制系统根轨迹图(0<K*<∞),并判断闭环系统的稳定性。
②如果改变反馈通道的传递函数,使H(s)=1+2s,重做第①小题,并讨论H(s)的变化对系统稳定性的影响。
第7题
A.风湿热
B.慢性肾炎
C.SLE
D.自身免疫性溶血性疾病
E.重症肌无力
第8题
系统的微分方程组如下

式中:K0、K1、K2、T均为正常数。试建立系统结构图,并求出传递函数C(s)/R(s)、C(s)/N1(s)、C(s)/N2(s)。
第9题
系统的微分方程如下,式中:τ、K1、K2、K3、K4、K5、T均为正的常数。试建立系统r(t)对c(t)的动态结构图,并求出系统的传递函数C(s)/R(s)。

第10题
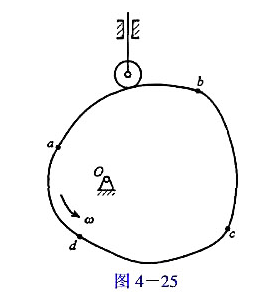
在图4-25所示凸轮机构中,已知凸轮以角速度ω逆时针方向转动,令凸轮的基圆半径以r0表示,行程以h表示,偏心距以e表示,压力角以a表示,推杆位移以s表示,凸轮的推程运动角δ0表示,回程运动角δ´0以表示,远休止角以δ´8表示,近休止角以δ´8表示,a为实际廓线推程起始点,b为实际廓线推程终止点,c为实际廓线回程起始点,d为实际廓线回程终止点.试作图表示:
(1)凸轮的基圆并标注其基圆半径r0;
(2)推杆的行程h;
(3)当前位置时的压力角α和位移s;
(4)凸轮的偏心距e;
(5)凸轮的推程运动角δ0、回程运动角δ´0、远休止角δ´8和近休止角δ´8.
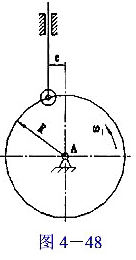
第11题
设计一偏置直动滚子从动件盘形凸轮机构,凸轮回转方向及动件初始位置如图4-48所示,已知:偏距e=5mm,基圆半径R=20mm,滚子半径rT=5mm,升程h=15mm,从动件运动规律:升程运动角φ=180°从动件以等加速等减速运动上升,远休止角φ8=30°,回程运动角φ´=120°从动件以等速运动至最低点,近休止角φ´s=30°,试:
(1)绘出从动件位移线图;
(2)绘出凸轮实际轮廓曲线.