题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
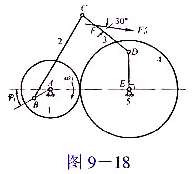
在图9-18所示机构中,已知:两齿轮的模数m=2mm,z1=38,z4=64,a=20°.AB=25mm,lBC
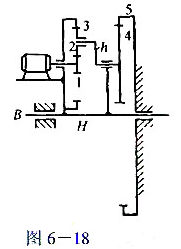
在图9-18所示机构中,已知:两齿轮的模数m=2mm,z1=38,z4=64,a=20°.
AB=25mm,lBC=127mm,lCD=76mm,lDE=50mm,φ1=30°.设ω1为顺时针方向.设作用在构件3上的总惯性力F´a=450N,lCF=20mm.其余构件上的惯性力以及各构件的重力均忽略不计.求需加于构件1上的平衡力偶矩和各运动副中的反力.
 答案
答案
查看答案


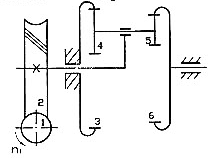
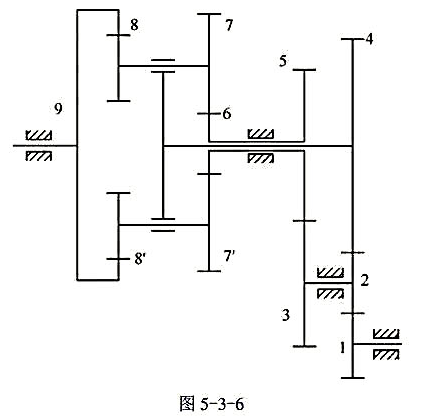
 1,求齿轮Z1与系杆H的传动比
1,求齿轮Z1与系杆H的传动比 ?
?
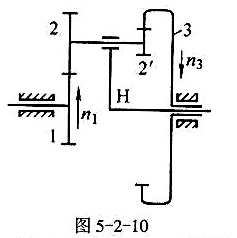
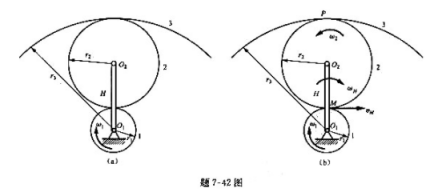
 齿轮1的转速为200r/min(箭头向上),齿轮3的转速为50r/min(箭头向下),求行星架转速nH的大小和方向。
齿轮1的转速为200r/min(箭头向上),齿轮3的转速为50r/min(箭头向下),求行星架转速nH的大小和方向。